法國人發明的康達效應遙控飛碟
http://jlnlabs.online.fr/gfsuav/gfsuavn01a.htm



Above, after a computer designed phase, below, the true model is now a reality (below).


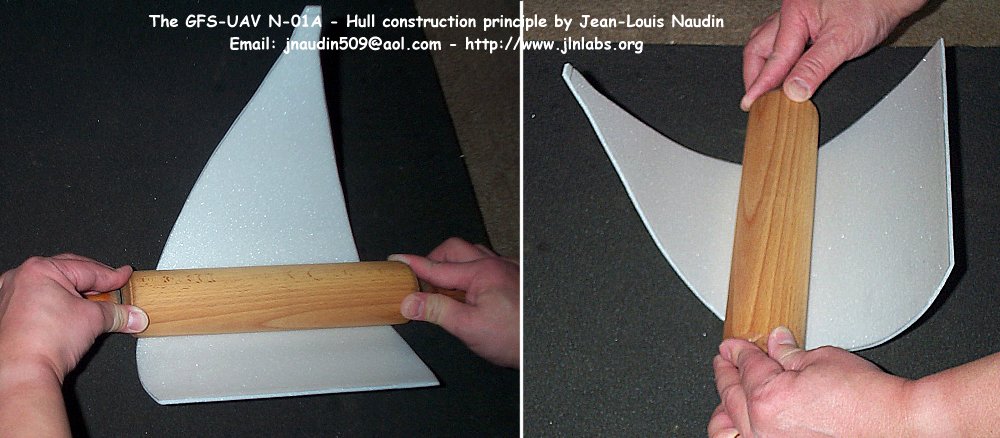
The curved petals, the key of the Coanda effect, are carefully assembled and glued on the main structure.
Be carefull to avoid cracks on the curved surface, click here to see the method to roll the petals on the main structure.


The GFS-UAV N-01A hull is now finished and perfectly in line with the CAD design...


The four moving flaps are ready to be assembled on the hull with an adhesive tape as hinge.

The moving and fixed rudders for the yaw and the anti-torque control are prepared and installed.

Above: A detailled photo about the main electronic parts (receiver, gyro, Lipo battery, the pitch and bank servos)

Above : A detailled view about the command of the flap.
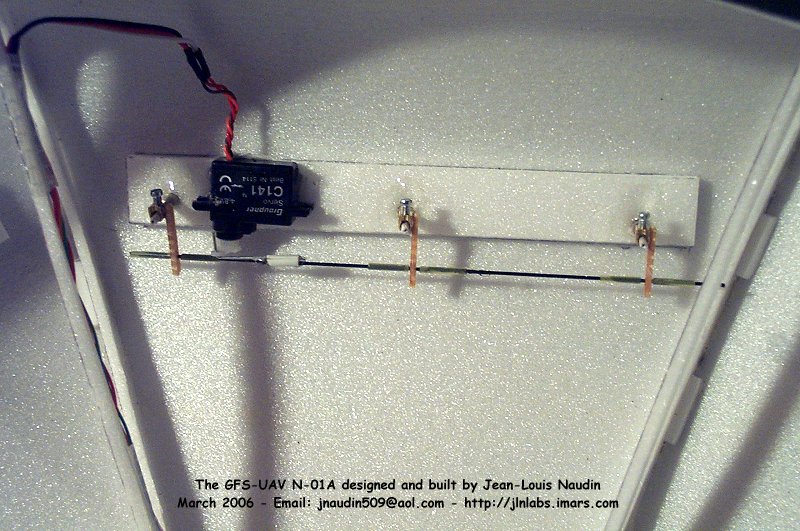
Above : A detailled view about the command of the moving rudders.
There are 4 servos in parallel controled by the anti-torque piezo gyro for the yaw control (see below)



The ready to flight weight of the GFS-UAV N-01A is 533 g with a video camera transmitter on board.
I recommend strongly to add a streamlined body 280 mm diameter and 60 mm height and placed at 45 mm above the hull. You will notice that the efficiency will be greatly improved and the flight more stable. The streamlined body is made with a 3 mm thick depron foam and fixed with 8 carbon rods (2 mm diam) on the hull.

Above, you will find the correct setup for the all flaps.
I also recommend you to use at least a 150 Watts brushless motor with your GFS-UAV N-01A.

The best engine tested for the GFS-UAV N01 is the outrunner brushless motor : AXI 2808/24 with
a propeller Graupner ECO CAM PROP 10/6" ( 25/15 cm ) ref : 2941.25.15
| ||||||||||||||||||||||

{kind=link}

The Lipo battery used is a PowerHouse (selected cells) 3S1P at 11.1V 950mA (rated for 25C)
Lipo pack weight : 96 g


沒有留言:
張貼留言